
Proud Car Test 2013
Public Road Urban Driverless-Car Test 2013
Per la prima volta nella storia, durante il test PROUD-Car Test 2013 (tenutosi il 12 luglio 2013 a Parma) un veicolo senza guidatore al posto di guida si è mosso in totale sicurezza su strade cittadine aperte al traffico regolare. Recentemente altri sistemi simili sono stati realizzati da altri ricercatori e case automobilistiche di tutto il mondo, ma questa è stata la prima volta che al posto di guida non sedeva nessuno, per sottolineare l’affidabilità del sistema finale.
Il veicolo non è telecomandato, ma al contrario è dotato di sensori che percepiscono l’ambiente circostante; i sistemi di bordo interpretano la situazione del traffico e reagiscono di conseguenza, attivando lo sterzo e modulando la velocità in modo autonomo (senza intervento umano).
La Sfida:
La parte più complessa di questo esperimento è la gestione del traffico reale, sia in ambiente extraurbano (sulla tangenziale dei Parma) che in ambiente urbano (nel centro cittadino di Parma). Un elemento che ha notevolmente aumentato la complessità è la necessità di attraversare rotonde (di dimensioni e sagome diverse), sottopassi, passaggi pedonali, e semafori, in quanto queste situazioni articolate richiedono una profonda interpretazione da parte del sistema di bordo.
La VisLab Driverless Car durante l’esperimento (con i dati del veicolo).
Video ‘uncut’ dell’intero esperimento.
Percorso, Permessi e Sicurezza:
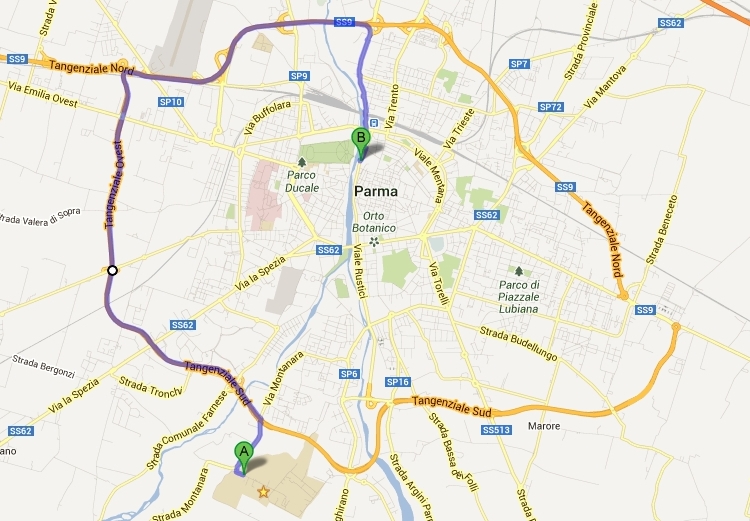
Il percorso, dal campus universitario (A) a Piazza della Pace (B), comprende strade di campagna a doppio senso di marcia, due tangenziali con svincoli, e una moltitudine di aree urbane comprendenti passaggi pedonali, tunnel, dossi artificiali, rotonde molto strette e semafori.
Questo esperimento, organizzato dall’Università di Parma – Dip. di Ingegneria dell’Informazione, VisLab, e DISS (Centro Universitario per la Ricerca Avanzata sulla Sicurezza Stradale), è stato possibile grazie alla collaborazione con: Direzione Centrale della Motorizzazione Italiana, Ministero dell’Interno – Polizia Stradale, ANAS, Comune di Parma, Polizia Municipale, e Camera di Commercio di Parma.
Questo esperimento porta l’Italia in primo piano per quanto riguarda le sperimentazioni di nuove tecnologie sulle strade pubbliche; altri Paesi al mondo hanno già adottato o stanno per adottare legislazioni specifiche. La possibilità di effettuare test in ambiente aperto al traffico pubblico (contrapposto a circuiti di prova chiusi al traffico) è di importanza basilare per la validazione del sistema complessivo.
La sicurezza del veicolo e di tutti gli altri attori sulla strada è garantita dalla possibilità di intervenire direttamente da parte del passeggero mediante doppio pedale in caso di situazioni impreviste; inoltre, da una vettura che segue il veicolo a breve distanza, altro personale ha la possibilità di bloccare il veicolo in qualunque momento grazie ad un telecomando radio.
Tecnica di Guida e Problemi Aperti:
Il veicolo possiede la mappa della città corredata da alcune informazioni aggiuntive. Una volta determinato il percorso, il veicolo definisce la traiettoria di movimento considerando informazioni quali la mappa GPS, la presenza di segnaletica orizzontale, eventuali ostacoli sul percorso. Contemporaneamente definisce il profilo delle velocità sulla base della geometria della strada, della presenza di ostacoli, e chiaramente rispettando i limiti massimi.
Questo esperimento rappresenta un passo ulteriore verso la guida totalmente automatica in qualunque condizione, tuttavia il sistema correntemente in uso non è in grado di gestire in maniera ottima alcune situazioni comuni come tra l’altro le rotonde di grandi dimensioni, le immissioni su strade con diritto di precedenza, i semafori multipli, e la gestione di lavori in corso.
La versione corrente del software sul veicolo gestisce le rotonde e le immissioni in modo conservativo: il veicolo si ferma completamente prima di entrare nella rotonda o all’ingresso di una strada a flusso veicolare veloce.
I Sensori sul Veicolo:
Sul veicolo sono installati numerosi sensori, non tutti utilizzati per questo esperimento. I sensori utilizzati sono:
– due telecamere frontali per localizzare ostacoli (pedoni, biciclette, altri veicoli) sul percorso, per individuare e interpretare i semafori, per determinare la posizione della segnaletica orizzontale, e per ricostruire il profilo del terreno di fronte al veicolo
– due telecamere laterali e due laserscanner laterali per gestire gli ingressi nelle rotonde
– un laserscanner frontale e due laterali localizzano gli ostacoli laterali (come ad esempio veicoli in avvicinamento, guard rail e lati dei tunnel)
– due telecamere laterali orientate verso la parte posteriore del veicolo per localizzare i veicoli in avvicinamento sulle corsie adiacenti.
I sensori installati sul prototipo comprendono due tecnologie: telecamere e laser, che si complementano in modo molto semplice.
Il Sistema Stereoscopico del VisLab:
Il sistema di visione frontale, basato sull’elaborazione in tempo reale di due immagini provenienti da due telecamere sincronizzate, fornisce una stima della conformazione del terreno di fronte al veicolo e contemporaneamente localizza gli ostacoli frontali.
Elabora 25 immagini al secondo (provenienti dalle due telecamere a 12.5 Hz) ognuna formata da 1 Mega pixel; ricostruisce il mondo tridimensionale di fronte al veicolo ogni 80 millisecondi, producendo una nuvola di circa 10 milioni di punti 3D ogni secondo.
Un esempio di una nuvola di punti 3D; la telecamera virtuale si muove all’interno della nuvola di punti per mostrarne l’accuratezza
Un esempio di ricostruzione 3D: localizzazione di ostacoli e stima del profilo del terreno
Il sistema di visione stereoscopico è un prodotto della ricerca del VisLab ed è disponibile sul mercato: include software e hardware (telecamere e sistema di elaborazione). La versione corrente pesa meno di 1kg ed è adatta anche per applicazioni di Unmanned Aerial Vehicles. Il sistema software, sviluppato negli ultimi anni, una volta raggiunta la maturità è stato finalizzato ed ora -grazie all’aiuto di un progetto ERC PoC- è in fase di realizzazione una versione basata su FPGA a basso costo e basso consumo che potrà essere usata anche in diversi ambiti, oltre a quello automobilistico.
Chi fosse interessato a diventare un beta tester prima che il sistema finale sia rilasciato ufficialmente è pregato di contattarci.
Caratteristiche dei veicoli autonomi VisLab:
Le caratteristiche principali dei prototipi sviluppati dal VisLab sono:
– l’utilizzo di sensori di basso costo (principalmente microtelecamere)
– integrazione spinta (i sensori sono quasi invisibili e ben integrati nello chassis del veicolo).
Altri veicoli automatici sviluppati da altri centri di ricerca sono basati su tecnologie diverse, come ad esempio radar oppure un sistema laser molto performante ma che richiede un posizionamento molto invasivo sul tetto del veicolo.
Finanziamento del Progetto:
Il progetto del veicolo BRAiVE è iniziato nel 2008 e la realizzazione è terminata a metà 2009, quando il veicolo è stato trasportato a Xi’an, Cina, per la presentazione ufficiale alla conferenza mondiale sui veicoli intelligenti, IEEE Intelligent Vehicles Symposium 2009. I finanziamenti, sia per l’acquisto di attrezzature che per la copertura dei costi di personale, nonchè per la sperimentazione estensiva, sono giunti in prevalenza da ERC (European Research Council) grazie ad un grant prestigioso (Advanced Grant) ottenuto dal Prof. Alberto Broggi e dalla Fondazione Cassa di Risparmio di Parma. Molti partner, principalmente stranieri, si sono poi aggiunti al progetto.
Il passato, il presente e il futuro della ricerca del VisLab:
Quindici anni esatti sono passati dal primo test di guida automatica su strade pubbliche (‘MilleMiglia in Automatico’) portato a termine dal VisLab nel Giugno del 1998 (see Wikipedia), che ha segnato la storia della robotica veicolare mondiale. Grazie a quell’esperimento il VisLab ha assunto una posizione di rilievo nel panorama mondiale nel campo della percezione per la guida automatica.
Video celebrativo dei 10 anni dalla MilleMiglia in Automatico, 1998
Dopo aver preso parte con successo alle DARPA Grand Challenge (2005) e DARPA Urban Challenge (2007)dove il veicolo TerraMax ha guidato in modo autonomo sia in ambienti fuoristrada che in ambienti urbani simulati (chiusi al traffico pubblico), nel 2010 la tecnologia VisLab è stata testata per 3 mesi consecutivi lungo le strade di due continenti; il primo test di guida automatica su percorso intercontinentale (VIAC, VisLab Intercontinental Autonomous Challenge, da Parma a Shanghai, Cina) ha permesso di mettere a punto la tecnologia che poi è stata utilizzata nell’esperimento del 2013 (PROUD-Car Test 2013).
Il test intercontinentale VIAC, 2013
Il 12 luglio 2013, oltre ad essere state dimostrate la capacità del veicolo BRAiVE, è anche stato presentato il nuovo veicolo autonomo del VisLab la cui installazione sarà ultimata entro la fine del 2013 e che avrà caratteristiche uniche e assolutamente innovative. Il progetto è avvenuto grazie a finanziamenti della Rete Alta Tecnologia della Regione Emilia Romagna, all’interno del progetto dei Tecnopoli, di cui il gruppo VisLab fa parte. Nuovi partners internazionali si sono aggiunti al progetto e lo promuoveranno internazionalmente a breve. Diversi postdoc da tutto il mondo richiedono annualmente di trascorrere un periodo di ricerca presso il VisLab; le persone selezionate si occuperanno di questo progetto una volta terminata la fase di equipaggiamento del veicolo, prevista per fine 2013.
Il Futuro della Mobilità – La Visione del VisLab:
Sulle strade europee perdono la vita più di 40.000 persone all’anno, ma il dato ancor più impressionante è che più del 93% degli incidenti è dovuto a cause umane: distrazione, guida sotto l’effetto di sostanze, imperizia.
La guida automatica di veicoli (dove il guidatore è sostituito da sistemi elettronici)è da tutti vista come la soluzione definitiva al problema della mortalità sulle strade. Il VisLab dell’Università di Parma da quasi 20 anni porta avanti ricerche nel campo della guida automatica ed ha all’attivo numerose pietre miliari nella storia della robotica veicolare mondiale: dal primo test al mondo di guida automatica in condizioni reali in autostrada (nel 1998), fino al primo test al mondo di guida automatica su un percorso intercontinentale (da Parma a Shanghai, Cina, nel 2010).
Una volta che questa tecnologia sarà considerata sufficientemente matura, la mobilità di persone e merci cambierà totalmente:
– Non più vetture di proprietà: tutti i veicoli saranno condivisi, come dei taxi senza guidatore. Il veicolo verrà chiamato quando se ne ha la necessità e una volta a destinazione il veicolo sarà a disposizione del prossimo cliente.
– Non più veicoli parcheggiati ai lati della strada: una volta a destinazione il veicolo sarà a disposizione del prossimo cliente oppure si recherà automaticamente al parcheggio che potrà anche essere in una zona lontana.
– Non più semafori: i veicoli, grazie alla capacità di comunicazione tra di loro, si coordineranno per transitare negli incroci sfiorandosi e senza impattare.
– Non più ingorghi: i veicoli si coordineranno evitando le zone ad alto traffico per minimizzare il tempo di viaggio
– Non più patente di guida: tutti avranno la possibilità di muoversi sulle strade senza la necessità di patente di guida, incluso gli anziani, i giovani e i diversamente abili.
– Non più costruzione di nuove strade: i veicoli saranno in grado di muoversi ad alta velocità e a distanza ravvicinata per cui le arterie stradali riusciranno ad ospitare un numero maggiore di veicoli e verrà incrementata la portata di ogni corsia già esistente.
– Non più illuminazione stradale eccessiva, invasiva, costosa ed inquinante.
– Non più incidenti: finalmente la strada sarà un ambiente senza incidenti. La cronaca degli incidenti stradali rimarrà solo un ricordo del passato.
Qui al VisLab non sappiamo ancora quando tutto ciò diventerà realtà, ma è il sogno che abbiamo e che stiamo costruendo passo dopo passo, non senza difficoltà.
Il miglior riconoscimento per le nostre attività odierne e future è la speranza che tra qualche decina di anni tutto questo sarà ovvio, così come oggi ci aspettiamo di poter parlare al telefono cellulare in ogni parte del mondo. E noi saremo orgogliosi di aver dato il nostro piccolo contributo.