
Proud Car Test 2013
Public Road Urban Driverless-Car Test 2013
For the first time in history, during the PROUD-Car Test 2013 event (happened on July 12, 2013 in Parma) a vehicle moved autonomously and in total safety on a mixed traffic route (rural, freeway, and urban) open to public traffic, with nobody on the driver seat.
Recently other similar systems have been realized by other researchers and auto makers all over the world, but this has been the first time that nobody was in the driver seat, to underline the system robustness.
The vehicle is not remotely controlled, but on the contrary it is full of sensors to perceive the surrounding environment; the on board systems interpret the traffic situation e react accordingly, acting on steering and changing speed in autonomous mode (with no human intervention).
The Challenge:
The most complex part of this experiment is the handling of real traffic, both in a highway setting (ring around Parma) and in a urban setting (downtown Parma). An element that greatly increased complexity is the need to negotiate roundabouts (of different size and shape), underpasses, pedestrian crossings, artificial bumps, traffic lights, since these articulated situations require a deep environmental interpretation by the on-board system.
Inside VisLab driverless car during the experiment (with vehicle data).
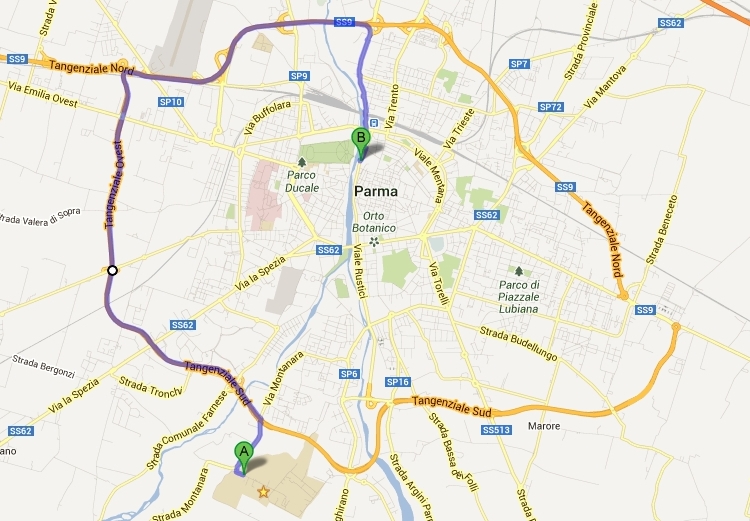
Route, Permissions, and Safety:
The route -from the University Campus (A) to Piazza della Pace (B), included two-way rural roads, two freeways with junctions, and plenty of urban areas such as pedestrian crossings, tunnels, artificial bumps, tight roundabouts, and traffic lights.
This experiment, organized by Univerista` di Parma – Dip. di Ingegneria dell’Informazione, VisLab, and DISS (University Center for Advanced Research on Road Safety), was made possible thanks to the cooperation of: Direzione Centrale della Motorizzazione Italiana, Ministero dell’Interno – Polizia Stradale, ANAS, Comune di Parma, Polizia Municipale, and Camera di Commercio di Parma.
This experiment brings Italy to the leading edge concerning the testing of new technologies on public roads; other Countries already adopted a specific legislation (or are close to). The possibility to conduct tests in an environment open to public traffic (as opposed to closed test tracks) is of paramount importance for the validation of the final system.
The safety of the test vehicle and other road participants was guaranteed by the possibility of a direct intervention by the passenger thanks to a brake pedal in case of unexpected situations; furthermore people on the following vehicle were able to shut down the autonomous vehicle and block it at any time thanks to a remote control over a radio link.
Driving Technique and Open Issues:
The vehicle owns an area map also featuring a subset of ADAS information. Once determined the route, the vehicle defines its future trajectory considering information such as GPS map, lane markings, possible obstacles on the path. At the same time it defines its speed profile based on road geometry, obstacle presence, and obviously also respecting speed limits.
This experiment represents a further step towards totally autonomous driving in any situation, but the system actually implemented on the test car is not currently able to handle some common situations in an optimal way, such as for example large roundabouts, merging into high speed roads, multiple traffic lights, and road works. The current version of the software manages roundabouts and road merging in a conservative way: the vehicle comes to a complete stop before entering into the roundabout and before merging into other roads
Vehicle Sensors:
Many different sensors are installed on the vehicle, but not all have been used in this test. The sensors used are:
– two frontal cameras locate obstacles (pedestrians, bicycles, other vehicles) on the path, locate and interpret traffic lights, determine the position of lane markings, and reconstruct the terrain profile
– lateral cameras together with lateral laserscanners handle merging and roundabouts
– a frontal laserscanner together with two lateral laserscanners locate lateral objects (like nearby vehicles, barriers, tunnel sides)
– two backward looking cameras locate vehicles in adjacent lanes.
The sensors installed on the prototype include two different technologies: cameras and lasers, which complement each other in a very straightforward way.
VisLab’s stereoscopic vision system:
Many different sensors are installed on the vehicle, but not all have been used in this test. The sensors used are:
– two frontal cameras locate obstacles (pedestrians, bicycles, other vehicles) on the path, locate and interpret traffic lights, determine the position of lane markings, and reconstruct the terrain profile
– lateral cameras together with lateral laserscanners handle merging and roundabouts
– a frontal laserscanner together with two lateral laserscanners locate lateral objects (like nearby vehicles, barriers, tunnel sides)
– two backward looking cameras locate vehicles in adjacent lanes.
The sensors installed on the prototype include two different technologies: cameras and lasers, which complement each other in a very straightforward way.
An example of 3D point cloud; the virtual camera moves into the point cloud to show the accuracy of the reconstruction. When watching this video, please select HD quality in YouTube settings.
An example of 3D reconstruction, object detection and tracking, and terrain mapping. When watching this video, please select HD quality in YouTube settings.
The stereoscopic vision system is a product of VisLab research and is now available to help other research centers as a low cost and small signature perception system: it includes software and hardware (cameras and processing board). The current version weights less than 1kg and is suitable also for unmanned aerial vehicles. As a further improvement, the software algorithms, which now reached maturity, were freezed and -thanks to the help of an ERC PoC project- they are now being ported on a new low cost and low power hardware system, based on a simple FPGA. This new version is now under preparation and will join the current COTS-based product in late 2013; it will also be used in different applications besides the automotive arena.
If you are interested in becoming a beta tester, before the final system will be officially released, please let us know.
Differences with other autonomous vehicles:
The main characteristics of the vehicle prototypes developed by VisLab are:
– the use of low cost sensors (mainly cameras)
– deep integration (the sensors are almost invisible and will integrated in the vehicle chassis).
Other autonomous vehicles developed by other research centres are based on different technologies, such as for example radar or a high performance laser which unfortunately requires an invasive installation on top of the vehicle.
Project Funding:
The funding, for equipment, man power, and experiments, came mainly from ERC (European Research Council) thanks to a prestigious grant (Advanced Grant) obtained by prof. Alberto Broggi and from Fondazione Cassa di Risparmio di Parma. Many additional partners, mainly foreigners, joined the project afterwards.
Past, present, and future of VisLab research:
Exactly 15 years have passed since the first autonomous driving test on public roads (‘MilleMiglia in Automatico’) organized by VisLab in June 1998 (see Wikipedia), which marked the history of vehicular robotics worldwide. Thanks to that experiment, VisLab assumed a relevant position in the worldwide panorama in the field of perception for autonomous driving.
Celebration of the 10th anniversary of the MilleMiglia in Automatico, 1998
After successfully taking part to the DARPA Grand Challenge (2005) and DARPA Urban Challenge (2007) during which the TerraMax vehicle drove autonomously in off-road and simulated urban environments (closed to public traffic), in 2010 VisLab technology was tested for 3 months in a row along the roads of two continents; the first autonomous driving test on an intercontinental route (VIAC, VisLab Intercontinental Autonomous Challenge, from Parma, Italy, to Shanghai, China.) allowed to fine tune the technology currently used in the 2013 experiment (PROUD-Car Test 2013).
The VIAC intercontinental test, 2013
On July 12, 2013, besides demonstrating BRAiVE’s capabilities, the new VisLab prototype vehicle was presented,whose equipment will be finalized by the end of 2013 and which will have unique and absolutely innovative characteristics. The realization of this vehicle was made possible thanks to funding coming from Rete Alta Tecnologia, of the Emilia-Romagna Region, within the Tecnopoli project, in which VisLab plays an active role. New international partners then joined the project and are expected to promote its results globally soon. A number of prospective postdocs from all over the world are applying annually to spend a period of time at VisLab; those selected will have the opportunity to work on this project, once the vehicle will be finalized.
The future of Mobility – VisLab’s vision:
40.000 individuals die every year on European roads; nevertheless the most striking number is that more than 93% of road accidents are due to human errors: distraction, driving under the influence of substances, impairment. Automatic vehicle guidance (where the driver is replaced by electronic systems) is seen by everyone as the definitive solution to the problem of road fatalities. University of Parma’s VisLab has been working in this field for nearly 20 years and has set a number of worldwide milestones: from the first worldwide test on public roads with off-the-shelf components (in 1998), till the first autonomous driving test on an intercontinental route (from Parma, Italy, to Shanghai, China, in 2010).
Once this technology will be considered sufficiently mature, human and goods mobility will totally change:
– No more personal vehicles: all vehicles will be driverless and shared, just like cabs without a driver. The vehicle will be called upon necessity, and once the destination will be reached, the vehicle will be available to the next passenger.
– No more parked cars alongside roads: once reaching its destination, the vehicle will be available to the next passenger or will autonomously reach a pakring space, which may also be in a remote location.
– No more traffic lights: vehicles, thanks to their intervehicle communication capabilities, will coordinate to pass through intersections with a constant flow, without interfering with each other.
– No more traffic jams: vehicle will coordinate, avoiding to hit congested areas in order to minimize travel time.
– No more driving licences: everyone will enjoy enhanced mobility on roads without the need for a driving licence, included elderly, young, and handicapped individuals.
– No more building of new roads: vehicle will be able to move at high speeds and with a short intervehicle distance so that the current road network will be able to host a larger number of vehicles; the throughput of each existing lane will be greatly incremented.
– No more excessive, invasive, expensive, and polluting road illumination
– No more accidents: finally the road will be an accident-free environment and road casualties will be a thing of the past.
Here at VisLab we don’t know when all this will become a reality yet, but this is our dream and we are working hard to make it happen, step by step, not without difficulties.
The best reward for our current and future efforts is the hope that in a few decades all this will become obvious, just like today we expect to be able to talk over a cell phone in every corner of the world. And we will be proud for our contribution.